网球拍效应与欧拉动力学方程
文章图片

文章图片

文章图片

文章图片
文章图片

1985年 , 为了拯救当时出现故障的苏联空间站礼炮七号 , 派出了两名宇航员进行抢修 。 在完成任务之后 , 其中一名宇航员贾尼别科夫打开了从地球带来的物资 。 这些物资是用一个翼型螺母锁紧的 , 当这个螺母被松开并继续在空间站漂浮旋转的时候 , 贾尼别科夫发现它会周期性地掉转180度 。 后来 , 这个现象被称为贾尼别科夫效应 。
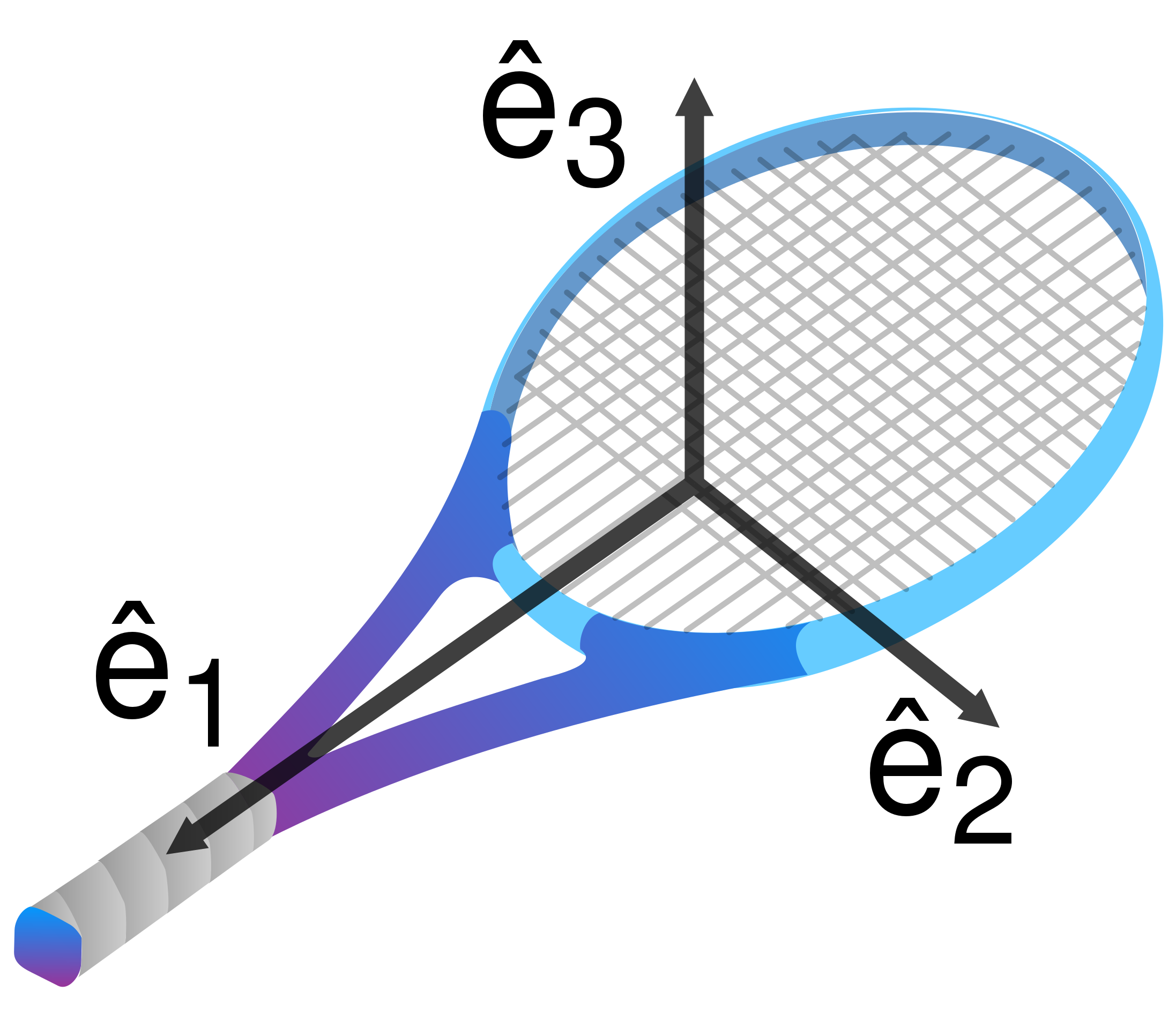
事实上 , 我们在地球上也能重现该效应 。 以网球拍为例 , 我们人为地给它设定三个相互垂直的主轴:一是沿着把柄的主轴 , 二是垂直于把柄并在网的平面内的主轴 , 三是垂直于把柄和网的主轴 。 当我们让网球拍绕着一或三主轴旋转并把它抛入空中时 , 拍子的旋转是稳定的 , 它只会绕着初始轴旋转 。 当我们让网球拍绕二主轴旋转并抛入空中时 , 它的运动是不稳定的 , 最后会演变成绕着三个轴旋转 。 所以 , 贾尼别科夫效应又叫作网球拍效应或中间轴效应 。
在1991年的时候 , 一篇公开发表的文章才解释了这种效应 。 我也看过一些解释这种效应的科普文章和视频 , 他们要么用纯文字进行解释 , 要么直接给出欧拉动力学方程的结果进行解释 。 今天 , 我们从推导欧拉动力学方程开始 , 逐步给出这种效应的解释 。
欧拉动力学方程推导首先 , 我们要知道力矩和角动量的关系 。 如果你已经忘了 , 那么我们可以回想一下力和动量的关系:力等于动量对时间的导数 。 同样 , 力矩等于角动量对时间的导数 。
等式的左边是力矩M , 我们可以直接写出它的分量形式 。
等式的右边是角动量对时间求导 , 虽然它计算比较复杂 , 但我们仍然可以写出分量形式 。
接下来这里有一个问题 , 后三项是基本矢量随时间的变化 , 它们取决于我们所取的坐标系 。 在这里 , 我们所取的是刚体坐标系 。 在刚体坐标系下 , 基本矢量是随着刚体的旋转而旋转 , 所以基本矢量随时间的变化就是角速度ω叉乘这个基本矢量 。 如果还不明白 , 可以想想高中时是怎么推导圆周运动的加速度 。
根据矢量叉乘的法则 , 最后一项我们可以写成以下形式 。
现在 , 整个式子变得非常复杂 , 但是如果我们代入角动量、角速度和转动惯量的关系 , 式子就会变得非常简单 。 在惯量主轴下 , 转动惯量不会随着旋转变化 , 我们有以下关系:
把它代入上面的式子 , 最终我们会得出这样的结果:
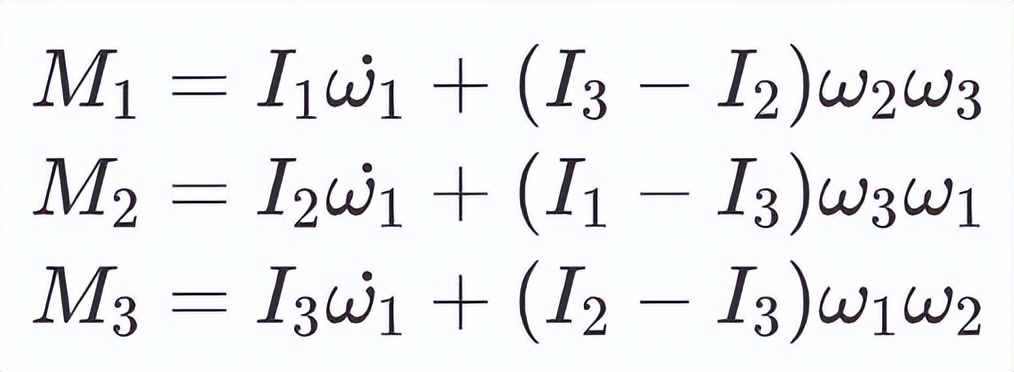
最后 , 我们让每个分量的力矩和每个分量的角动量对时间求导相等 , 就得到著名的欧拉动力学方程 。
网球拍效应解释解释网球拍效应一个很重要的点是理论与现实的差距 。 理论上 , 我们可以让网球拍绕任何一个轴稳定转动 , 而绕另外两个轴转动的角速度永远是零 。 但现实中 , 我们无法做到这一点 , 总是会有一些扰动破坏这种理想状态 。 现在 , 我们要研究的是 , 给了微小扰动之后 , 这个扰动会不会被放大 。
我们假设转动惯量1>转动惯量2>转动惯量3 , 并且网球拍抛到空中后没有任何力矩 。 首先研究绕主轴1旋转的情况 , 此时ω1恒定 , 它对时间的导数也基本为零 , 而ω2和ω3受到扰动而出现微小的角速度 。 现在 , 对欧拉动力学方程的第二个方程求导 , 并把第三个方程代入其中 , 我们可以得到:
根据转动惯量的大小 , 我们可以知道k<0 , 是我们很熟悉的波动方程 , 微小的扰动成正弦变化不会被放大 , 因此绕主轴1旋转是稳定的 。 同样的道理 , 我们也可以得出绕主轴3的转动是稳定的 , 这里就不再计算 。
但是 , 当绕主轴2旋转时 , 同样的道理我们可以得到:
推荐阅读










- 动物界的美与丑
- 白蚁与蚊子一样也有趋光性?
- 你可知道业主委员会与物业管理公司的关系、有什么权利义务?
- 29岁小伙与62岁大妈相恋!!谈及私密生活,小伙:那个都不重要了
- 面对野兽,普通人有何应对方法,人与自然是否能和谐相处?
- 浙江杭州,一女子与朋友到餐厅吃饭喝酒时,因大量饮酒导致醉酒。
- 向太坐私人飞机回内地疑抓人,向佐宁可与网红聚会也不参加儿子百日宴
- 元与多元,认识世界的两种基本相生的模式
- 吞噬星空:罗峰拯救过地球几次?与外来入侵者的实力差距有多大?
- 人类是最高级的动物吗?