
文章图片
文章图片

【《Science Adv.》哈佛大学:介电弹性体致动器将程序形状变形为复杂的目标形状!】介电弹性体致动器(DEA) 是最快、最节能的变形材料之一 。 迄今为止 , 它们的形状已通过图案化电极或加强元件进行控制 。 虽然可以针对电极或加强元件的规定配置(正向问题)分析它们的驱动形状 , 但变形为目标形状的 DEA 的设计(逆向问题)尚未完全解决 。 近日 , 科研人员报告了一种用于逆向设计和制造可编程形状变形 DEA 的简单分析解决方案 。 为了实现目标形状 , 将两种机制结合起来 , 通过分别图案化不同形状的局部有源层和刚性环的数量来局部控制驱动幅度和方向 。 该组合设计和制造策略能够创建复杂的 DEA 架构 , 这些架构可以变形为简单的目标形状 , 例如 , 具有零、正和负高斯曲率的那些以及复杂的形状 , 例如脸 。
图1. 用于变形为半球形帽的形状变形 DEA 的示意图和模拟 。
图2. 变形为具有零高斯曲率、正高斯曲率和负高斯曲率的明确目标形状 , 分别如 I、II 和 III 列所示 。
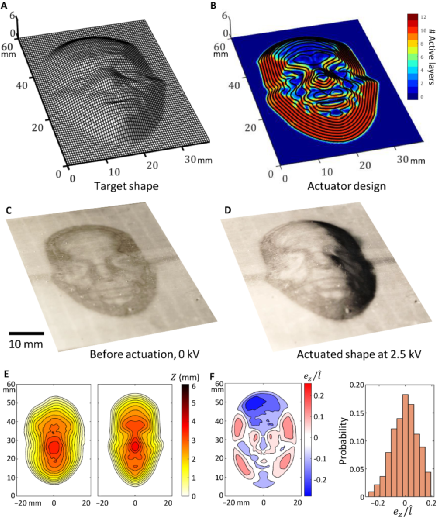
图3. 变形为复杂的目标形状 。
图4. 具有不同数量的环、层和厚度 (FEA) 的执行器 。
相关论文以题为Programmed shape-morphing into complex target shapes using architected dielectric elastomer actuators发表在《Science Advances》上 。 通讯作者是哈佛大学Ehsan Hajiesmaili教授 。 参考文献:DOI: 10.1126/sciadv.abn9198






