文章图片
【环球网无人机频道 采访人员 赵汗青】国外DroneDJ网站12月17日报道 , 来自康奈尔大学(Cornell University )和arXiv实验室的研究人员展示了他们最新的无人机项目 , 其可使蜂群无人机在编队飞行时动态避开障碍物 。
文章图片
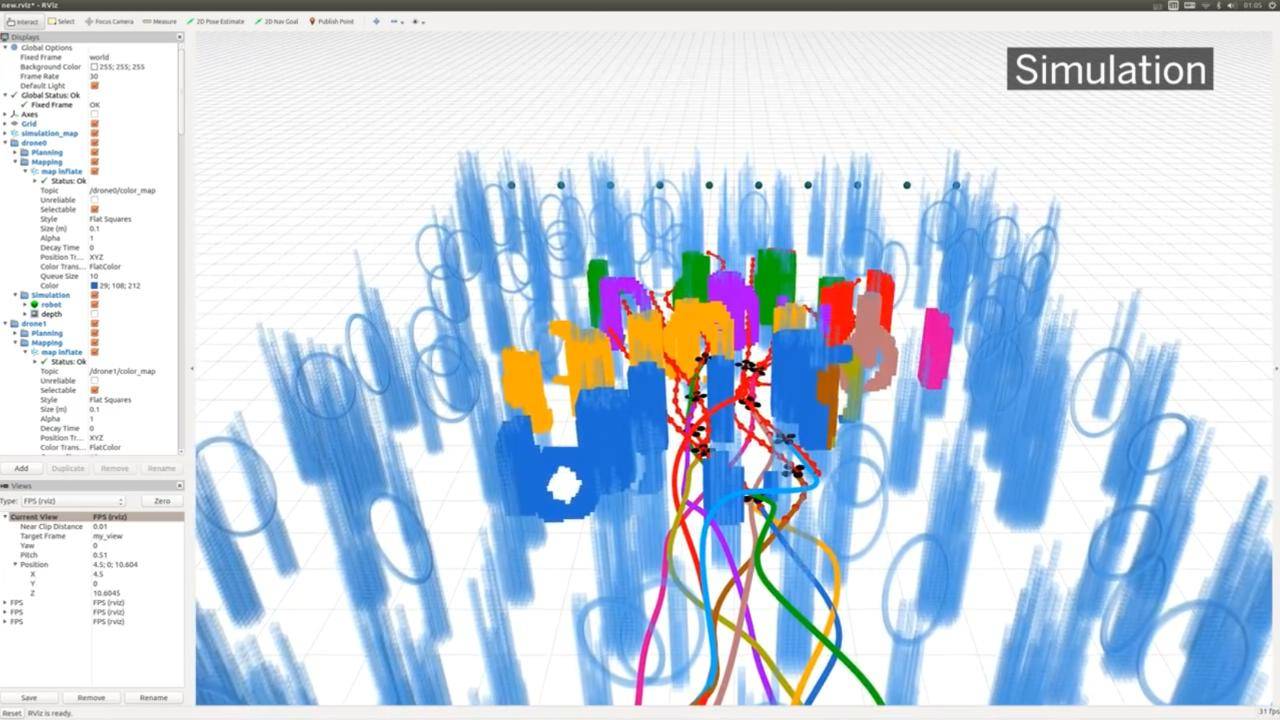
据介绍 , 该项目采用分布式异步(decentralized and asynchronous)系统解决方案 。 测试的这些无人机已经用一种特殊的避障技术改造过 , 可以在彼此的帮助下动态避开障碍物 。 每架无人机都配备了视觉传感器 , 可以创建虚拟的地图 。 所有的数据又被收集起来来创建一个大的地图 , 每架无人机可以以此确定自己的飞行方向 。

文章图片
报道称 , 该系统已经在处理能力非常低、无线连接也很差的条件下进行过测试 , 这使得它成为农村和没有网络连接的地区的一个很好的解决方案 。 只需三架无人机既可以用相当快的速度穿越森林而不会撞到树 。
【蜂群|科幻!蜂群无人机快速穿越树林,互相帮助来避障】该研究小组称 , 该方案可以很容易地扩大到更大规模的无人机编队上 , 目前他们已经测试了10架无人机编队 。 空中的无人机越多 , 就越可以在更短的时间内收集到更多的数据 , 这非常适于执行测绘和搜索救援任务 。
推荐阅读



- 相关|科思科技:无人机地面控制站相关设备产品开始逐步发力
- IT|川崎测试货运无人机机器人K-Racer X1
- 马蜂窝|吸尘器+无人机除马蜂窝?外来马蜂在日本蔓延,日企这样改装设备应对
- 环境研究院|国外科学研究:配上“双眼”,农业无人机看得更精准
- 大会|国内首次 有点科幻 互联网巨头在元宇宙开大会
- 变化|科幻文学已处于“爆款”前夜?
- 青少年|全国首家体教融合青少年无人机研学基地正式挂牌成立
- 场馆|汇聚工业风、科幻、神话故事,瞭仓沉浸式数字艺术馆明日开馆
- 硬件|DARPA长航时Manta Ray海洋无人机项目已转入第二阶段
- 形态|有人/无人机如何协同作战?