文章图片
文章图片

来源:【高分子材料科学】微信公众号
【前沿报道】
我们皮肤中受体的范围使我们可以在触摸物体时进行感应 , 并且还可以使我们大致了解该物体的温度 。 在人造皮肤样材料中实现这一点一直是一个挑战 , 因为大多数触摸感测方法本身都是温度敏感的 。 You等人研究了导电弹性膜中的离子弛豫动力学 。 他们表明 , 离子弛豫时间可以用作检测温度的不敏感应变的本征变量 , 而电容可以用作检测应变的不敏感温度的外在变量 , 从而将二者去耦 , 从而使它们的信号不会干扰彼此 。
【科研摘要】
人体皮肤具有不同类型的触觉受体 , 可以将各种机械刺激与温度区分开 。 浦项科技大学Unyong Jeong和斯坦福大学优秀华人鲍哲南教授团队提出了一种可变形的人工多峰离子受体 , 可以区分热和机械信息而没有信号干扰 。 从离子弛豫动力学的分析中得出了两个变量:电荷弛豫时间作为不敏感的固有变量来测量绝对温度 , 而归一化电容作为对温度不敏感的外部变量来衡量应变 。 具有简单电极-电解质-电极结构的人工受体可以通过仅在两个测量频率下测量变量来同时检测温度和应变 。 类似于人皮肤的多峰受体阵列 , 称为多峰离子电子皮肤(IEM-skin) , 可在各种触觉运动(剪切 , 收缩 , 张开 , 扭转等)中提供实时的力方向和应变曲线 。 相关论文Artificial multimodal receptors based on ion relaxation dynamics发表在11月《Science》上 。
【图文解析】
人体皮肤体感系统的受体由离子导体组成 , 其操作基于离子动力学 。 真皮中大量热感受器和机械感受器在空间上分布 。 因此 , 在皮肤上的应变和温度的空间分布可以被独特地感知到(图1A) 。 离子受体的粘弹性变形能力在大剪切应变下保持稳定的电信号 。 此外 , 皱纹的形成是一种通过各种刺激(压力 , 剪切 , 挤压 , 扭转及其组合)可视化皮肤的三维(3D)变形的方式 。 例如 , 皱纹出现在皮肤的压缩区域 , 而另一侧的区域被拉伸(图1B) 。 温度感测对触觉和监测身体的生理变化很重要 。 由于3D变形会产生复杂的应力场 , 因此 , 对接触和应变的空间分布进行实时采集对于理解皮肤感觉系统的感知至关重要 。
图1AMI受体的概念 。
作者探索了可变形离子导体的离子弛豫动力学 , 并制造了一种人工多峰离子受体(AMI受体) 。 在非法拉第离子导体中 , 离子的迁移和极化发生在施加的交流电(ac)场下 。 离子导体的电性能取决于测量频率 。 离子迁移或极化分别在低频或高频下占主导地位(图1C) 。 图1D显示了机械拉伸下Bode图的变化 。 整个阻抗曲线向下移动 , 因为来自R和C的阻抗会随着拉伸而减小 。 但是 , 由固有变量(σ , ?)组成的τ-1不会随着拉伸而变化 , 因为尺寸参数会相互抵消 。 图1E显示了加热条件下波特图的变化 。 R由于加热而向下移动 , 并且τ-1移至更高的频率 。 由于离子电导率的温度敏感性比介电常数高 , 因此平坦区域的降档远大于对角线区域的降档 。 图1F给出了热机械去耦的原理 。 弛豫时间可以用作对应变不敏感的固有变量 , 以检测温度而无需传感器的几何信息 。
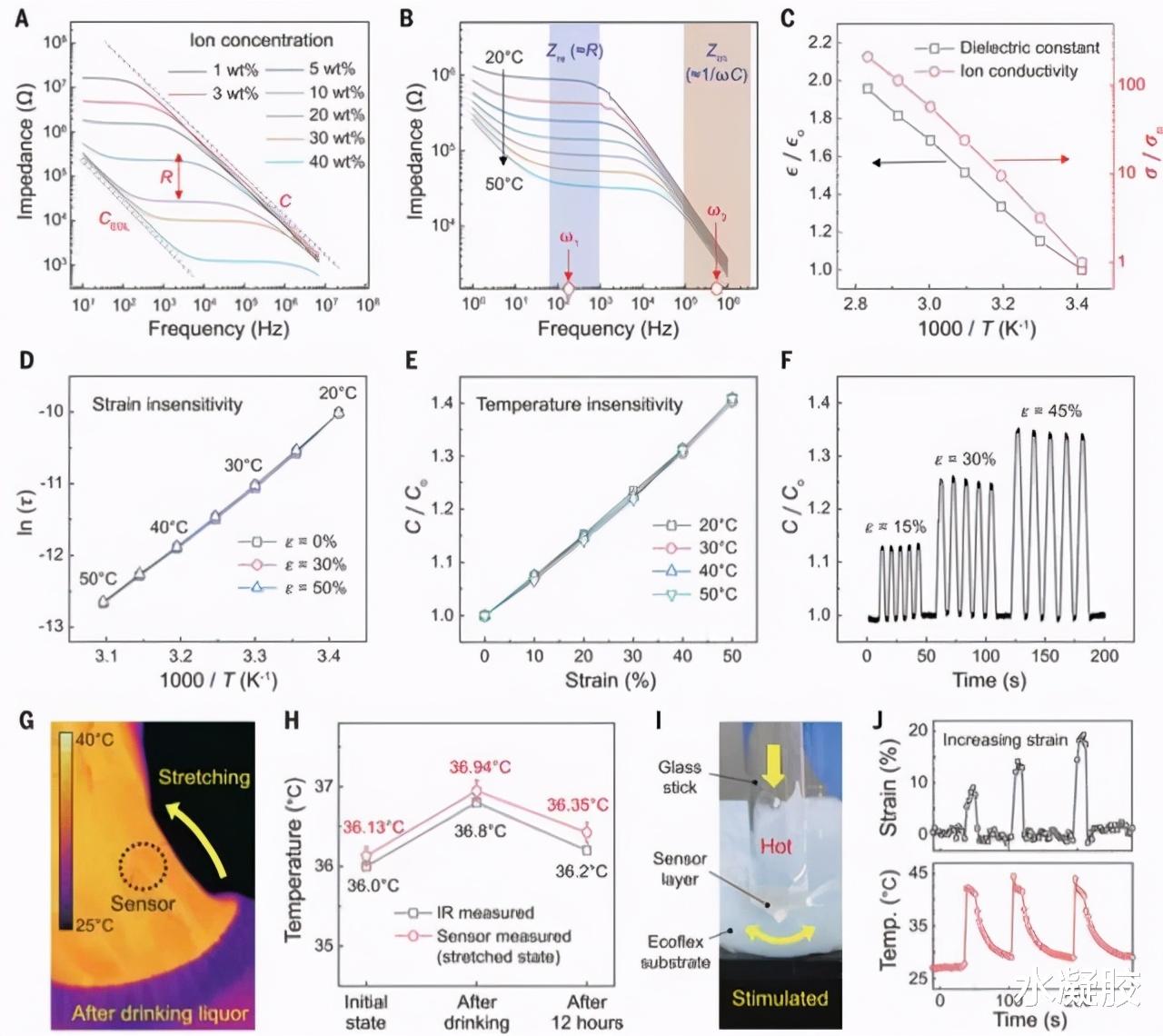
将离子导体1-乙基-3-甲基咪唑双(三氟甲基磺酰基)酰亚胺(EMIM TFSI)旋涂(厚度为5μm)在由Ag纳米线和热塑性嵌段共聚物 , 聚苯乙烯嵌段制成的可拉伸复合电极膜上-聚(乙烯丁烯-嵌段-聚苯乙烯(SEBS) 。 通过堆叠两个多层 , 将离子导体层夹在两个电极之间 。 由于薄的粘弹性层之间的保形接触 , 多层具有良好的粘附性 。 在20°C下测量具有各种离子浓度(1至50 wt%)的离子导体的波特图(图2A) 。
图2AMI受体的特性及其对加热和拉伸的响应 。
作者将目标温度感应设置在体温(20°至50°C)附近 。 图2B给出了在各种温度下离子导体(5%重量)的波特图 。 图2C显示了σ的温度依赖性 , 和? 。 σ的灵敏度是相对?的100倍 。 图2D显示使用ln(τ)作为不敏感应变的变量来检测温度 。 在不同应变(ε= 0、30、50%)下测得的所有曲线均落入主曲线 , 表明τ不受尺寸变化的影响 。 图2E显示了使用C / Co作为对温度不敏感的外在应变的应变感应变量 。 在不同温度下 , C / Co对单轴应变的所有曲线均落入主曲线;因此 , 可以从曲线拟合方程中计算出应变 。 通过多次测试证实了实时多峰传感 , 首先 , 我们将AMI受体附着在颈静脉上方的皮肤上并进行了监测 , 从而证实了C / Co对拉伸的响应在不同应变的重复拉伸过程中是可再现的(图2F) 。 饮酒前后的体温(图2G) 。 为了检查接触(压力)时的热机械解耦 , 将热的(45°C)玻璃棒反复压在AMI受体上 , 该受体放置在厚而柔软的弹性体上基板(图2H) 。
推荐阅读







- 科学家成功地配制了,各种具有溶解和吸收行为优势的纳米晶体制剂
- 酷似克苏鲁之眼!AI仿生眼未来将超越人眼,成为元宇宙之门?
- 腐蚀试验的测试目的和检测项目
- 最近只有34.1万公里!又一颗小行星被发现,我国天文学家立功
- 旋挖钻机行业9大骗局,各位老板请注意
- 电磁搅拌控制激光固态成形Inconel 718高温合金的组织和机械性能
- 通过等离子体增强激光纳米焊接提高金属纳米电极的导电性
- 专治土壤镉污染!华中农大发布新型微生物菌剂
- 中科院开发纳米传感器,可高效检测氨基脲和肝素
- 如果有超光速运动的恒星,那是不是意味着有上帝存在?