机器之心报道
编辑:小舟
人工智能必须理解物体之间的潜在关系才能更好地与世界交互 。人们观察场景通常是观察场景中的物体和物体之间的关系 。 比如我们经常这样描述一个场景:桌面上有一台笔记本电脑 , 笔记本电脑的右边是一个手机 。
但这种观察方式对深度学习模型来说很难实现 , 因为这些模型不了解每个对象之间的关系 。 如果不了解这些关系 , 功能型机器人就很难完成它们的任务 , 例如一个厨房机器人将很难执行这样的命令:「拿起炒锅左侧的水果刀并将其放在砧板上」 。
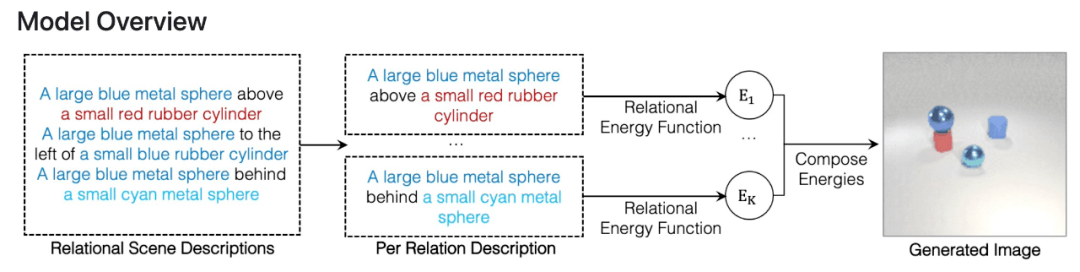
为了解决这个问题 , 在一篇 NeurIPS 2021 Spotlight 论文中 , 来自 MIT 的研究者开发了一种可以理解场景中对象之间潜在关系的模型 。 该模型一次表征一种个体关系 , 然后结合这些表征来描述整个场景 , 使得模型能够从文本描述中生成更准确的图像 。
文章图片
论文地址:https://arxiv.org/abs/2111.09297
现实生活中人们并不是靠坐标定位物体 , 而是依赖于物体之间的相对位置关系 。 这项研究的成果将应用于工业机器人必须执行复杂的多步骤操作任务的情况 , 例如在仓库中堆叠物品、组装电器 。 此外 , 该研究还有助于让机器能够像人类一样从环境中学习并与之交互 。
每次表征一个关系
该研究提出使用 Energy-Based 模型将个体关系表征和分解为非规一化密度 。 关系场景描述被表征为关系中的独立概率分布 , 每个个体关系指定一个单独的图像上的概率分布 。 这样的组合方法可以建模多个关系之间的交互 。
文章图片
该研究表明所提框架能够可靠地捕获和生成带有多个组合关系的图像 , 并且能够推断潜在的关系场景描述 , 并且能够稳健地理解语义上等效的关系场景描述 。
在泛化方面 , 该方法可以推广到以前未见过的关系描述上 , 包括对象和描述来自训练期间未见过的数据集 。 这种泛化对于通用人工智能系统适应周围世界的无限变化至关重要 。
以往的一些系统可能会从整体上获取所有关系 , 并从描述中一次性生成图像 。 然而这些模型不能真正适应添加更多关系的图像 。 相比之下 , 该研究的方法将单独的、较小的模型组合在一起 , 能够对更多的关系进行建模并适应新的关系组合 。
此外 , 该系统还可以反向工作——给定一张图像 , 它可以找到与场景中对象之间的关系相匹配的文本描述 。 该模型还可通过重新排列场景中的对象来编辑图像 , 使它们与新的描述相匹配 。
推荐阅读







- Tesla|特斯拉车主一夜之间保费暴增80% 到底发生了什么?
- 社交|扎克伯格,天才与恶人之间
- 散热|由液晶屏到笔记本:静、动之间感受科技之美
- 视点·观察|一夜之间,“眯眯眼”沦为全民公敌?
- 物体|中考物理光学重难点凸透镜考点梳理
- 训练|腾讯云副总裁吴运生:AI落地出现新变化,对细分行业需要深入理解
- 旗舰|华为P50宝盒发布,纵横之间,华为正式完成双折叠旗舰布局
- 宝武|卓越工程师 | 中国手撕钢研发团队领军人物王天翔:毫厘之间显匠心
- 宝武|中国手撕钢研发团队领军人物王天翔:毫厘之间显匠心
- 物体|西媒:超过3.3亿物体绕地球运动 太空碎片超“临界阈值”