我国研发的自主水下机器人首次完成北极海底科考

文章图片
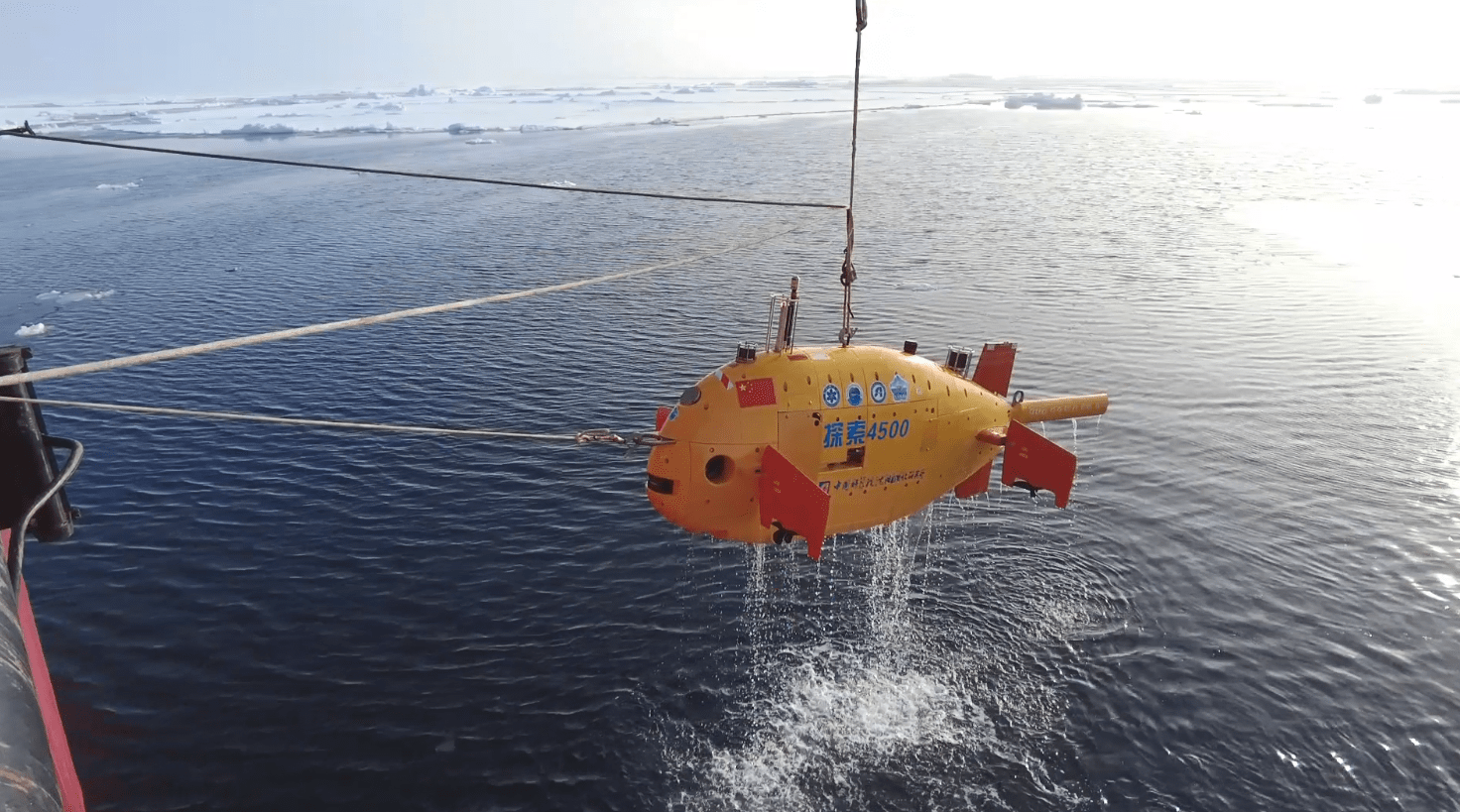
采访人员从中国科学院获悉 , 近日 , 由该院沈阳自动化研究所主持研制的“探索4500”自主水下机器人(以下简称 , “探索4500”)在我国第12次北极科考中 , 成功完成北极高纬度海冰覆盖区科学考察任务 。 日前 , 4名科考人员已随“雪龙”号科考船返回 。 这是我国首次利用自主水下机器人在北极高纬度地区开展近海底科考应用 , 其成功下潜为我国不断深化对北极洋中脊多圈层物质能量交换及地质过程的探索和认知提供了重要数据资料 , 将为我国深度参与北极环境保护提供重要的科学支撑 。
文章图片
据介绍 , 针对此次北极科考工作区高密集度海冰覆盖的特点 , 科研团队创新性地研发了声学遥控和自动导引相融合的冰下回收技术 , 克服了海冰快速移动和回收海域面积狭小给水下机器人回收带来的挑战 , 确保水下机器人在密集海冰覆盖区的北极高纬度海域连续下潜成功 , 并全部安全回收 。 在科考应用中 , “探索4500”成功获取了近底高分辨多波束、水文及磁力数据 , 为超慢速扩张的加克洋中脊地形地貌、岩浆与热液活动等北极深海前沿科学研究提供了一种最为先进的探测技术手段 。
据悉 , “探索4500”是中科院“热带西太平洋海洋系统物质能量交换及其影响”战略性先导科技专项支持研发的深海装备 。 为了参加此次北极科考 , 科研团队对“探索4500”进行了环境适应性、高纬度导航、海底探测、故障应急处理等技术升级与改造 , 并开展了湖海验证工作 , 全面提高了系统的可靠性 。 “探索4500”在科考中的成功应用 , 充分验证了其在北极冰区良好的低温环境适应能力、高纬度高精度导航性能、密集冰区故障应急处理能力和洋中脊近海底精细探测能力 , 开创了我国自主水下机器人在北极科考应用的先例 。
据沈阳自动化所副所长李硕研究员介绍 , 近些年来 , 面向国家重大需求 , 沈阳自动化所一直致力于推动水下机器人的谱系化发展 , 极地科考一直是水下机器人发展的重要方向 , 先后有四种类型六台套水下机器人参加了八次极地科考 , 为我国水下机器人在极地应用做出了重要贡献 。 “展望‘十四五’ , 沈阳自动化所将以此次北极科考为契机 , 继续面向国家在极地领域的重大战略需求 , 加大南北极海洋装备的研发力度 , 提高我国极地自主探测装备的科考能力 , 提升我国在极地事务中的话语权 , 积极推动我国由极地考察大国向极地科学强国的目标迈进 。 ”沈阳自动化所所长于海斌研究员表示 。
推荐阅读





- 公司|科思科技:正在加速推进智能无线电基带处理芯片的研发
- VIA|x86研发团队卖给Intel后 VIA出售厂房和设备:北美分部就此终结
- 通信运营商|我国现有行政村已全面实现村村通宽带
- 底层|上海:加强元宇宙底层核心技术基础能力前瞻研发
- 生物化学|我国卓越科技论文总体产出持续增长
- 国家|张云涛:中国新冠疫苗研发处于国际第一方阵
- 预定|我国成功发射通信技术试验卫星九号
- 生物地球化学过程|我国科学家发现第五条甲烷产生途径
- 谢存|工信部谢存:我国现有行政村已全面实现村村通宽带
- 项目|航天长峰国家重点研发计划项目“ECMO系统研发”原理样机联调成功