 文章图片 |
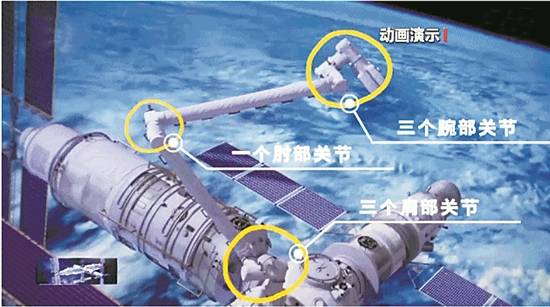
| 核心舱机械臂动画示意图 |
 文章图片 |
| 核心舱机械臂动画示意图 |
核心舱机械臂提供有力支撑
此次出舱活动首次检验了航天员与机械臂协同工作的能力 , 雄伟有力的空间站核心舱机械臂格外引人注目 。
空间站核心舱机械臂展开长度为10.2米 , 最多能承载25吨的重量 , 是空间站任务中的“大力士” 。 其肩部设置了3个关节、肘部设置了1个关节、腕部设置了3个关节 , 每个关节对应1个自由度 , 具有七自由度的活动能力 。
通过各个关节的旋转 , 空间站核心舱机械臂能够实现自身前后左右任意角度与位置的抓取和操作 , 为航天员顺利开展出舱任务提供强有力的保证 。
除支持航天员出舱活动外 , 空间站核心舱机械臂还承担舱段转位、舱外货物搬运、舱外状态检查、舱外大型设备维护等在轨任务 , 是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统 。
为扩大任务触及范围 , 空间站核心舱机械臂还具备“爬行”功能 。 由于核心舱机械臂采用了“肩3+肘1+腕3”的关节配置方案 , 肩部和腕部关节配置相同 , 意味着机械臂两端活动功能是一样的 。 机械臂通过末端执行器与目标适配器对接与分离 , 同时配合各关节的联合运动 , 从而实现在舱体上的爬行转移 。
据悉 , 航天科技集团五院在抓总研制过程中 , 在关键技术、原材料选用、制造工艺、适应空间站环境的长寿命设计等方面均取得创新突破 , 全部核心部件实现国产化 。
“机械伙伴”协助克服作业困难
航天服手套充压后操作不便、单手操作难度大、在轨防漂要求高……开展舱外作业 , 航天员面临诸多挑战 。 作为航天员执行出舱任务的“机械伙伴” , 舱外维修与辅助工具可以协助航天员有效克服这些困难 。
舱外维修与辅助工具不仅有用于舱外设备维修的舱外电动工具、舱外扳手、通用把手等工具 , 也有配合航天员舱外姿态稳定及转换的便携式脚限位器、舱外操作台等辅助工具 。
——舱外电动工具可以适应舱外复杂的真空和高低温环境 , 具有定力矩拧紧、拧松的工作模式 , 并且设置有休眠模式 。
——舱外通用把手可以安装到维修设备上 , 用于航天员在轨维修时进行待维修设备的转移及防漂 。
——便携式脚限位器设计了旋转、俯仰、滚转、偏航四个关节自由度 , 可协助航天员在舱外调整至执行任务的工作姿态;与之配合使用紧密的舱外操作台 , 可协助航天员进行维修任务时挂放设备和维修工具 , 解放航天员双手 , 实现设备或维修工具的临时存放 。
——与航天服直接相连的微型工作台 , 则像一根多功能腰带一样环绕在航天服腰部 , 将航天员出舱使用的舱外电动工具、舱外通用把手和舱外扳手随身携带 , 确保航天员随用随取 。
此次航天员出舱任务的成功实施 , 充分验证了舱外维修与辅助工具在轨应用的可靠性 , 后续将配合航天员完成更多在轨出舱任务 , 是我国空间站长期在轨运行的有力保障 。
文/新华社 央视 图/新华社 人民视觉
【维修|出舱好帮手机械臂 臂长力大还能爬行】
文章图片
推荐阅读



- 地面|全程回顾神舟十三号航天员乘组圆满完成第二次出舱任务
- 维修|思科MX800维修大屏更换调试案例 视频会议设备湖北武汉、辽宁沈阳两地同步维修
- 维修|全球首台天津造
- 维修|华为开启“服务感恩回馈季”:HarmonyOS 升级尝鲜等
- 华为|华为P50 Pocket维修价格公布:换屏4379元 碎屏保一年899元
- 全景|快看!昨晚错过的出舱精彩内容有人帮你画出来了
- 地面|太空中再次响起“感觉良好”,神舟十三号乘组圆满完成二次出舱
- 操作|神舟十三号航天员乘组圆满完成第二次出舱任务 即将在太空迎接新年到来
- 航天员|神舟十三号航天员乘组今日将第二次出舱
- 航天员|神舟十三号航天员乘组圆满完成第二次出舱全部既定任务