
文章图片
9月17日 , 神舟十二号载人飞船返回舱在东风着陆场成功着陆 。
文章图片
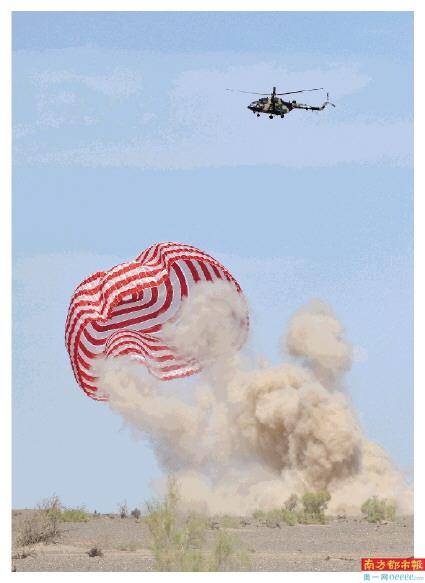
直升机参加搜救任务 。

文章图片
工作人员在对返回舱进行处置(无人机照片) 。

文章图片
工作人员在检查返回舱 。
9月17日 , 神舟十二号载人飞船返回舱平安降落在东风着陆场预定区域 。 这是神舟载人飞船首次在东风着陆场着陆 , 回收着陆是载人飞船飞行任务的最后阶段 , 也决定着飞行任务的最终成败 。 为了护佑航天员安全回家 , 科研团队为神舟十二号飞船研制了高可靠性和安全性的回收着陆系统 , 确保飞船返回舱走稳回家的路 。
1、精测高度:开启回家“大幕”
神舟十二号飞船在轨飞行过程中 , 回收着陆系统只是在返回舱内静静守候 , 直到飞船返回舱穿过大气层后自由下落至距地10公里高度时 , 由静压高度控制器判断高度 , 并发出回收系统启动信号 , 回收着陆系统才开始工作 。
静压高度控制器只是程序控制子系统的设备之一 , 整个程序控制的“幕后成员”还包括回收配电器、火工控制器、程序控制器、行程开关等 , 它们分工明确 , 各司其职 , 就像人类大脑的不同区域 , 通过发出程序控制指令信号 , 控制着“台前”各执行机构完成规定的弹伞舱盖拉引导伞、拉减速伞、减速伞分离拉主伞、主伞解除收口、抛防热大底、转垂挂等一系列不可逆的动作 。
2、逐级开伞:完成“急刹车”
1200平方米的降落伞在飞船返回舱降落时不能一下子全部打开 , 否则伞会被空气崩破 。 航天科技集团五院的设计师们为飞船量身定制了一套三级开伞程序 , 先打开两个串联的引导伞 , 再由引导伞拉出一顶减速伞 。 减速伞工作一段时间后与返回舱分离 , 同时拉出1200平方米的主伞 。
为防止减速伞和主伞张开瞬间承受的力太大 , 减速伞和主伞均采用了收口技术 。 也就是说 , 放慢伞绳从收拢到散开的过程 , 让1200平方米的大伞分阶段张开 , 保证整个开伞过程的过载处于航天员体感可承受的范围 。 航天员也正因为感受到这一连贯动作的晃动 , 才能确认回收系统工作正常 。
在开伞之后 , 由航天科工集团二院23所研制的测量雷达便开始发挥作用 。 依靠光学、红外探测设备 , 工作人员能探测到航天器的方向 , 但由于落点区域太大 , 能见度受天气条件等影响 , 很难明确降落的具体地点 。 通过测量雷达 , 可以不受天气影响 , 精细探测 , 大大减少搜救时间 , 提高搜救效率 。
推荐阅读





- 功能|小米 Watch S1图赏:商务气质新系列,稳步入场不急切
- 市场|激斗智能家居,大厂遇到新对手
- 殊荣|蝉联殊荣!数梦工场荣获DAMA2021数据治理三项大奖
- 识别|天津滨海机场RFID行李全流程跟踪系统完成建设 行李标签识别成功率可提升至99%
- 数字货币|2021年加密货币市场盘点:比特币仍是霸主,NFT进入大众视野
- 研究院|传统行业搭上数字化快车,施工现场变“智造工厂”
- 外置|好消息!巨好用的国球汇限定·汇星3耀眼登场,限时送福利!
- 首场|观测条件极佳!新年首场流星雨1月4日登场
- 矩阵|聚焦快递末端痛点 国内首款无人驾驶快递物流车在中通启动应用场景内测
- 观测|观测条件极佳!新年首场流星雨1月4日登场