机器之心原创
作者:思
2080Ti 竟然可以当 V100 来用 , 这个功能有点儿厉害 。自深度学习大潮兴起 , 模型就朝着越来越大、越来越 「深」 的方向发展 。
2012 年 , 拥有 5 个卷积层的 AlexNet 第一次在视觉任务上展现出强大的能力 。 在此之后 , 基础模型就开始「深」化起来:2014 年的 VGG-Net 达到了 19 层;2015 年的 ResNet、2017 年的 DenseNet 更是将深度提升到了上百层 。
模型大小的提升极大地提高了性能 。 因此 , 各大视觉任务都将 ResNet、DenseNet 等当做基本的 BackBone 。 但与此同时 , 模型的增大也意味着对显存的需求随之变高 。
为什么 GPU 显存如此重要?
九年前 , Hinton 等人率先用两张 3GB 显存的 GTX 580 GPU 高效训练 AlexNet 。 在此之后 , 显存需求与模型大小就一直同步增长 。 打比赛想要取到好成绩、做实验想要超越 State of the art 效果、做工程想要拟合庞大的业务数据等等 , 这些都离不开显存的加持 。
模型加一层 , 显存涨一分
在深度学习模型中 , 占用显存的总是那些特别大的张量 , 比如各层的权重矩阵、计算出来的张量(激活值)、反向传播需要的张量等 。 在视觉任务中 , 占据绝大多数的是中间计算出来的张量 。 随着模型变得更深更大 , 每一层的激活值张量都需要保留在显存中 。
以 ResNet50 为例 , 在模型的训练中 , 前向传播中 50 层的计算结果都需要保存在显存中 , 以便让反向传播利用这些张量计算梯度 。 如果使用 ResNet108 , 需要的显存就会比 ResNet50 多出一倍多 。 显存的增加 , 带来的当然是模型效果的提升 。 另一方面 , 如果显存不够 , 许多工作也必将无法实现 。
显存不够 , 写论文、打比赛屡遭掣肘
在实验室跑模型、写论文的过程中 , 显存不够用也是常有的事 。 一般实验室的显卡都是大家共用的 , 可能分配到每个人的手上已经所剩无几 。 甚至于 , 随着顶尖模型越来越大 , 所有人都没有足够的算力、显存去复现终极实验 , 更不用说超越其 SOTA 结果 。
遇到这种情况 , 学生无非只有两种选择:向导师申请新的 GPU 资源 , 或者缩减模型做一个 Mini 版的实验 。 前者并不总是能够成功 , 后者则可能会有种种不完美 。 如果能用有限的显存跑顶尖的大模型 , 做实验、写论文都会变得更加简单 。
此外 , 无论是在学校还是在公司打比赛 , 算力不够、显存不足都是常有的事 。 顶尖竞争者的模型结构可能相差无几 , 区别就在于谁的模型更大、更有能力去处理复杂的样本 。 更直观地说 , 排行榜领先者的模型也许就只差十几层 , 但也正是因为显存受限少了那十几层 , 有些模型才与冠军失之交臂 。
显存:约束算法工程师的瓶颈
再举一个常见的例子 , 企业中的算法工程师拥有足够的算力 , 显存没那么重要 。 然而 , 只使用并行策略分担显存 , 还是可能会出现显存足够、但每张 GPU 的计算负载又不足的情况 。
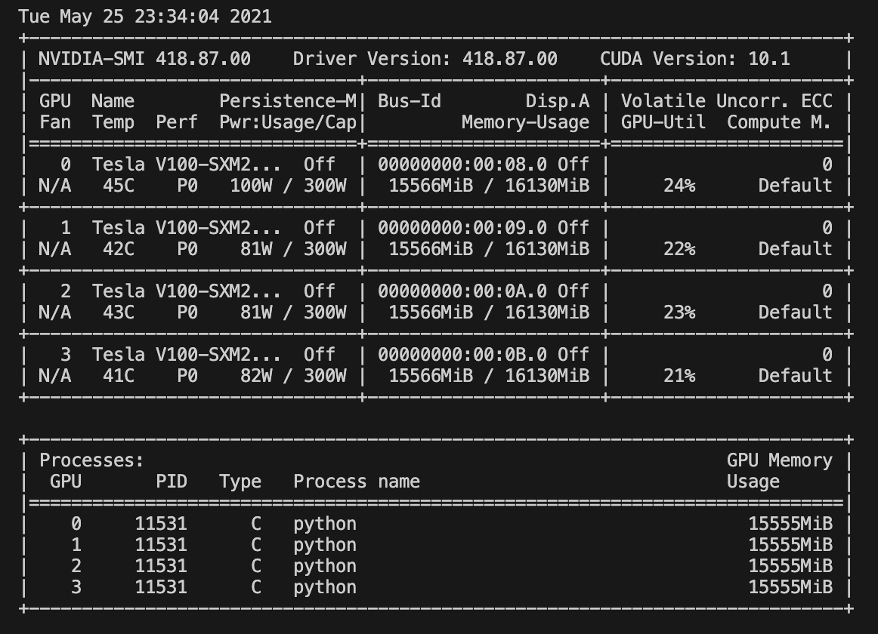
4 张 V100 , 显存占满 , 而 GPU 利用率很低 。
文章图片
即使是 V100 这样强大的算力 , 训练大模型时也很容易占满 16GB 显存 。 然而由于批量不够大 , 上图每张 V100 GPU 的利用率只有 20% 到 30% 。 只有继续增大每次迭代的数据吞吐量 , 才能增加 GPU 的利用率 。
MegEngine:显存需要优化
其实对于深度学习从业者来说 , 日常应用中出现的情况远不止上面三种 。 做深度学习 , 不论是研究还是工程 , 时不时就会遇到显存问题 。 但这个问题优化起来又很复杂 , 需要利用大量的工程实现来缓解 。 显然 , 这样的优化应该由深度学习框架来完成 。 不过 , 在实际应用中不难发现 , TensorFlow、PyTorch 似乎都没有提供完善的官方解决方案 。
但如果把目光投向新生势力 , 情况可能就不一样了 。 在旷视开源深度学习框架 MegEngine 最近发布的 1.4 版本中 , 该框架首次引入了动态图显存优化技术 , 大大降低了显存占用问题 。
具体来说 , 通过复现并优化 ICLR 2021 Spotlight 论文《Dynamic Tensor Rematerialization》(以下简称 DTR) , MegEngine 实现了「用计算换取更多显存」 。 有了这项技术的加持 , 模型的显存占用大大降低 , 同样的硬件可以训练更大的模型、承载更大的 BatchSize 。 如此一来 , 学生的小显卡也能开始训练大模型 , 而工程师们的服务器也经得起更充分的应用 。
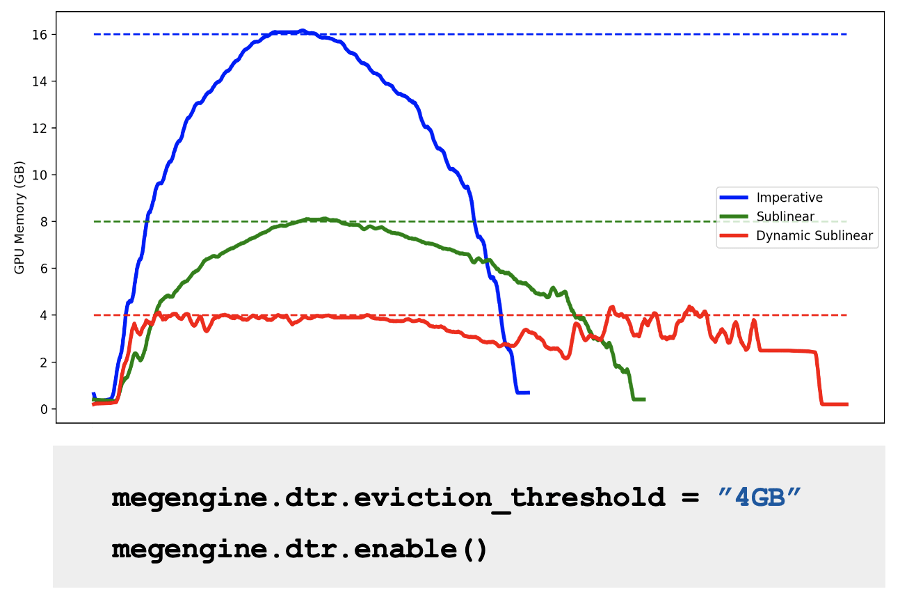
原本需要 16GB 显存的模型 , 优化后使用的显存峰值就降到了 4GB 。
文章图片
MegEngine 这种显存优化技术 , 让 1060 这样的入门级显卡也能训练原本 2080Ti 才能加载得上的模型;而 11GB 显存的 2080Ti , 更能挑战原本 32GB V100 才能训练的模型 。 要知道 , V100 的价格可是 2080Ti 的 9 倍还多 。
两行代码 , 显存「翻倍」
如要需要自己去优化显存 ,可能 99% 的算法工程师都会放弃 。 最好的办法是告诉深度学习框架 , 这次训练就分配多少显存 , 剩下的就交给框架自己去优化 。 MegEngine 的动态图显存优化就是基于这一逻辑 。
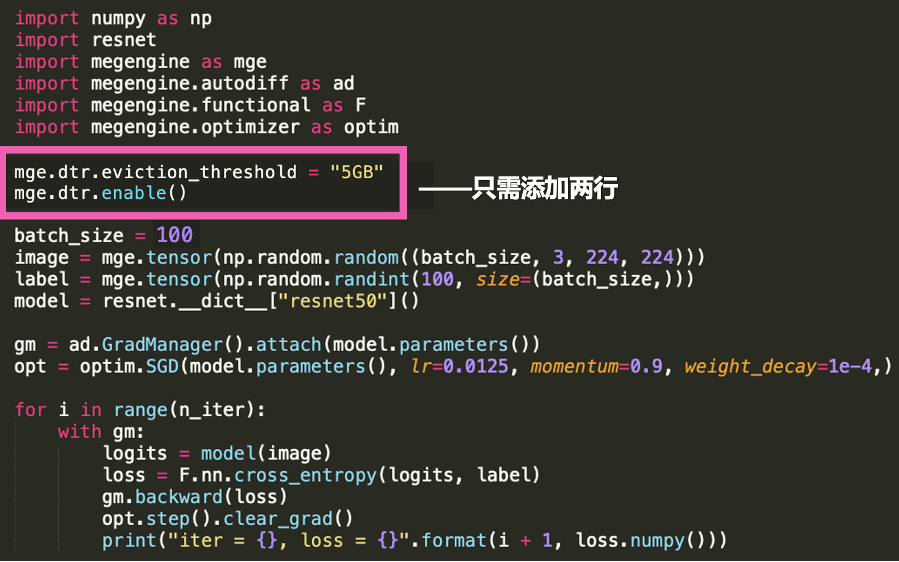
通过两行代码 , 框架可以全自动地完成显存优化 , 将所有优化逻辑与复杂的工程实现都隐藏在 MegEngine 内部 。
文章图片
如上图所示 , 在动态计算图中导入 DTR 显存优化模块 , 并配置显存释放阈值为 5GB 。 训练时 , 因为显存已经「翻倍」了 , Batch Size 翻四倍也能装到 GPU 中 。
显存扩增带来的收益
很多时候 , 提高显存的利用率 , 最显著的作用就是能训练更大的模型 。 从一定程度上来说 , 参数量越大就意味着效果越好;而批大小越大 , 梯度更新方向就越准确 , 模型性能也就越优异 。 MegEngine 开发团队做了很多实验 , 以确保提高显存利用率的同时训练是优质的 。
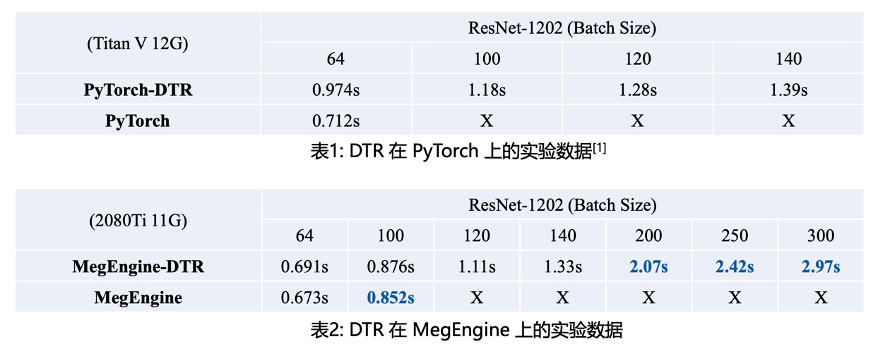
最简单的验证方法就是不断增加批大小 , 看看显卡到底能坚持到什么程度 。 下面两张表分别展示了在 PyTorch 及 MegEngine 上加载或不加载动态图显存优化(DTR)技术的效果 。
文章图片
如果不使用动态图显存优化技术 , PyTorch 上的模型一次训练迭代最多只能处理 64 个样本 , MegEngine 能处理 100 个样本 。 只要加上 DTR , PyTorch 模型一次迭代就能处理 140 个样本 , MegEngine 能尝试处理 300 个样本 。
如果换算成模型大小 , 加上动态图显存优化技术的 MegEngine , 在相同的 GPU 及批大小情况下 , 能高效训练增大近乎 5 倍的模型 。
MegEngine 动态图显存优化技术
深度学习模型的显存占用一般分为权重矩阵、前向传播的中间张量、反向传播的梯度矩阵(Adam 优化器)三部分 。
权重矩阵和梯度矩阵占的内存很难优化 , 各个模型基本上都有一个定值 。 前向传播的中间计算结果则不然:随着 Batch Size 的增加以及模型层和数量的增加 , 显存必然跟着增加 。 如果模型比较大 , 中间计算结果将占据最主要的显存 。

文章图片
如上图所示 , 在前向传播中(第一行从左到右) , 蓝色圆圈表示模型的中间计算结果开始占用显存 。 一直到前向传播完成 , 第一行完全变为蓝色圆圈 , 前面计算所占用的显存都不能释放 。
等到反向传播开始(第二行从右到左) , 随着梯度的计算与完成应用 , 前向传播保留在显存中的张量才可以释放 。
很明显 , 如果要降低显存占用 , 就要拿前向传播保存的中间计算结果开刀 , 这也正是 MegEngine 动态图显存优化的主要方向 。
用计算换显存
对于动态计算图 , 最直接的方法就是用计算或内存换显存 。 因此 , MegEngine 首先要决定到底使用哪种技术 。
MegEngine 团队通过实验发现 , 用计算耗时远比交换耗时少 。 例如从显存中节省 612.5MB 空间 , 用带宽换显存要比用计算换显存慢了几十上百倍 。
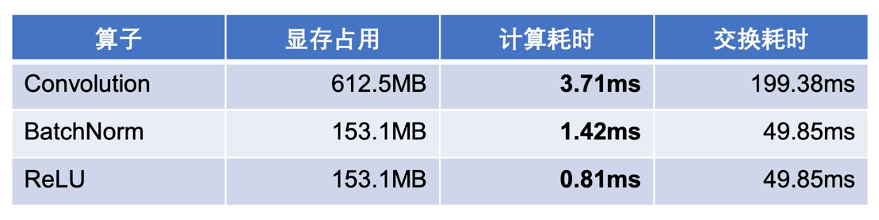
文章图片
因此很明确 , 动态计算图中也应该使用梯度检查点技术 , 用计算换显存 。
如下为梯度检查点技术原理示意 , 前向传播中第三个点为检查点 , 它会一直保存在显存中 。 第四个点在完成计算后即可释放显存 , 在反向传播中如果需要第四个点的值 , 可以从第三个点重新计算出第四个点的值 。
文章图片
虽然大致原理不难理解 , 但具体怎么做还是比较复杂的 , MegEngine 团队借鉴了论文《Dynamic Tensor Rematerialization》 , 将其优化并实现到 MegEngine 中 。
DTR , 最前沿的显存优化技术
DTR 是一种完全动态的启发式策略 , 核心思想是当显存超过某个阈值时 , 动态地释放一些合适的张量 , 直到显存低于阈值 。 一般而言 , 释放张量的标准有三个:重新计算出该张量的开销越小越好;占用的显存越大越好;在显存中停留的时间越长越好 。
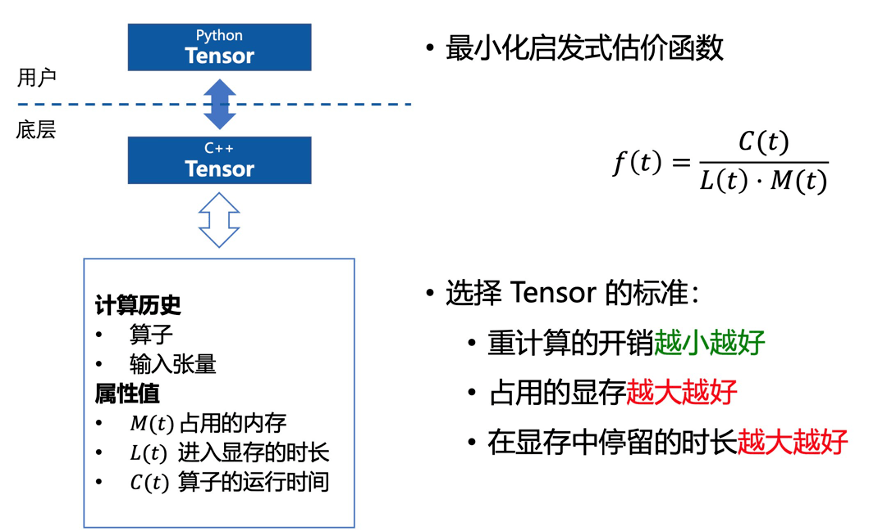
文章图片
除去从检查点恢复前向传播结果张量带来的主要开销 , DTR 的额外开销在于寻找应该被释放的最优张量 , 即计算上图张量 t 的 f(t)值 。 为了降低这一部分的计算量 , MegEngine 还采用了两种运行时优化:
- 不考虑小的张量 , 它们不加入候选集
- 每次在需要释放张量的时候 , 随机采样并遍历少部分张量 , 以节省计算开销
虽然 DTR 看上去原理也不复杂 , 但真正的难题在于提高易用性 , 即将所有细节都隐藏到框架的底层 , 只为开发者提供最简单的接口 。
在此就用一个最简单的计算例子 , 跟着框架演算一遍 , 看看 MegEngine 是如何利用动态图的计算历史恢复与释放张量的 。
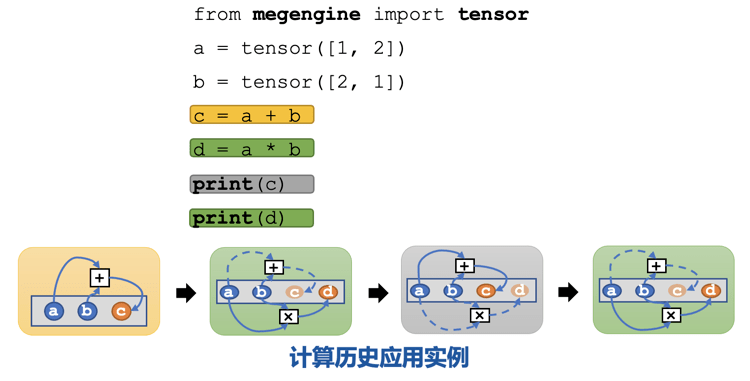
文章图片
现在假设输入有 a 和 b 两个张量 , 并希望计算 a*b 与 a+b , 但是显存最大只能保存三个张量 。 在黄框计算 c=a+b 时 , 显存还能保留张量 c , 然而在下一步绿框计算 d=a*b 时只能先释放 c 才能保存 d 。
不巧的是 , 下一步灰框需要获取黄框的计算结果 , 然而为了节省显存 , c 已经被释放了 。 所以 , MegEngine 现在需要做的是重新运行灰框的计算图 , 计算 c=a+b , 并加载到显存中 。 显然 , 这样做必然需要释放 d 的显存 。
这样一来 , 鉴于显存的限制 , MegEngine 就会自动选择合适的张量释放 , 并在需要时重新计算 。 如果需要重新计算某个张量的结果 , 例如上图的 d , 就需要具体的历史计算信息(在这里就是 a+b 这样的计算路径) , 与此同时还需要知道 a 和 b 这两个输入张量 。
所有这样的历史计算信息都由 MegEngine 自动获取与保存 , MegEngine 的工程师已经在底层用 C++ 处理完毕 , 用户完全不需要考虑 。
struct ComputePath {
std::shared_ptr<OpDef> op;
SmallVector<TensorInfo*> inputs;
SmallVector<TensorInfo*> outputs;
double compute_time = 0;
} *producer;
SmallVector<ComputePath*> users;
size_t ref_cnt = 0;
以上为 MegEngine 底层用于追踪计算路径信息的结构体 。 其中 op 表示产生该张量的算子;inputs 和 outputs 分别表示这个算子需要的输入与输出张量;compute_time 表示该算子实际的运行时间 。
实际上 , 在使用 MegEngine 的过程中 , 全都是用 Python 接口创建张量 , 只不过框架会对应追踪每个张量的具体信息 。 每当需要访问张量 , 不用考虑张量是否在显存中时 , 没有也能立刻恢复出来 。 所有这些复杂的工程化的操作与运算逻辑都隐藏在了 MegEngine C++ 底层 。
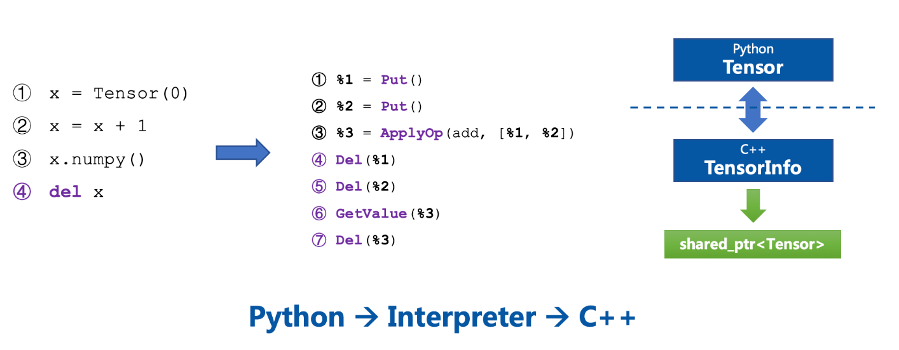
文章图片
Python 代码会翻译成 C++ 底层实现 , C++ 代码会通过指针管理显卡内存中真正的张量(右图绿色部分) 。
幸好这样的复杂操作不需要算法工程师完成 , 都交给 MegEngine 好了 。
【显存|显存不够,框架来凑:两行代码显存翻倍,2080Ti也能当V100来用】MegEngine 能做的事情远不止于此 , 只不过大多是像动态图显存优化这种技术一样 , 润物细无声地把用户的实际问题解决于无形 。 2020 年 3 月开源的 MegEngine 在以肉眼可见的速度快速成长 , 从静态计算图到动态计算图 , 再到持续提升的训练能力、移动端推理性能优化、动态显存优化…… 这也许就是开源的魅力 。 只有不断优化和创新 , 才能吸引和满足「挑剔」的开发者 。 MegEngine 下一个推出的功能会是什么?让我们拭目以待 。
推荐阅读







- Siamese|一个框架统一Siamese自监督学习,清华、商汤提出简洁、有效梯度形式,
- nVIDIA|RTX 3080 Ti移动GPU爆料:16Gbps显存 最大175W TGP功耗
- 模型|经逆向工程,Transformer「翻译」成数学框架 | 25位学者撰文
- 市场|折叠屏手机想要爆红,光靠华为、小米、OPPO还不够,还缺苹果
- 频段|我学者提出拍赫兹通信新框架 助力未来6G发展
- 通信技术|我学者提出拍赫兹通信新框架 助力未来6G发展
- 多任务|一个自由小窗不够?小米 MIUI 13 Pad 预热,支持多任务自由窗口
- 人物|马斯克:“我‘不够变态’,所以上不了CNN”
- 版权|知网光是降价还远远不够
- 定义|【智库声音】美国《人工智能风险管理框架》概念先导!重新定义AI风险,指出管理框架的灵活可选性