文章图片
文章图片
文章图片
文章图片
文章图片
作者 | 杨畅 李水青
编辑 | 心缘
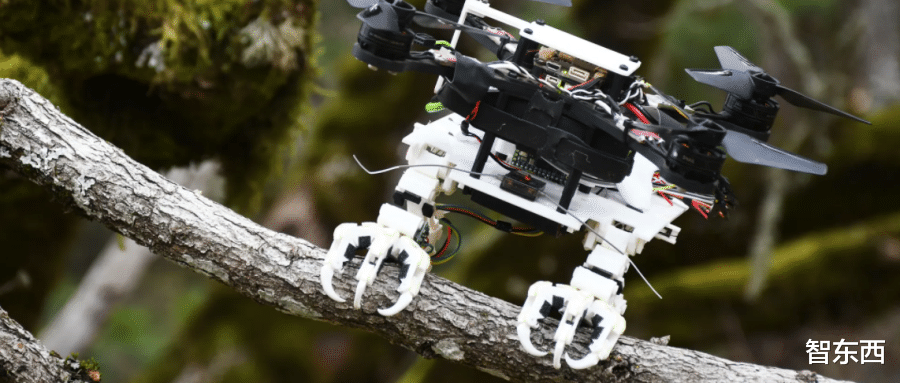
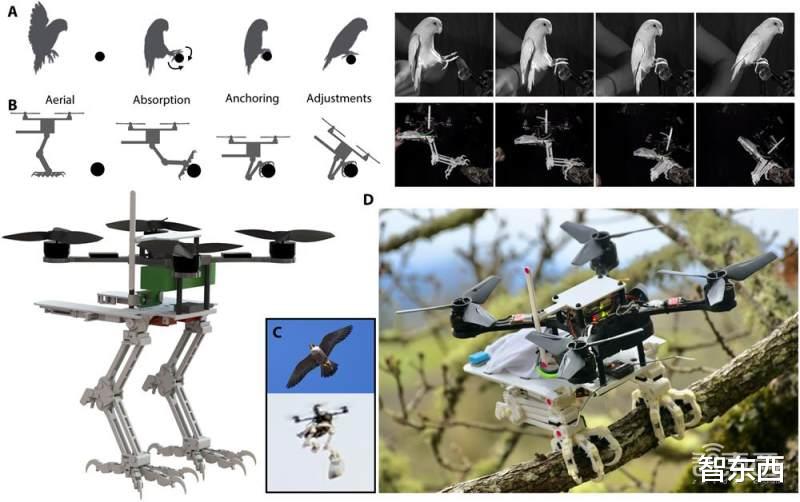
智东西12月2日报道 , 12月1日 , 斯坦福大学的一项新成果登上国际学术顶刊《科学》的子刊《科学·机器人学》封面 。 研究人员受鸟类启发 , 研发出一款名为SNAG的自动“机器脚爪” , 可以使无人机能够在复杂的表面起飞和降落 , 并捕捉空中的物体 。
多年来 , 无人机已经可以在天空上自由飞行 , 却并没有掌握稳定的着陆能力 , 经常“栽跟头” 。 鸟类几乎可以用脚爪缠住任何东西 , 掠过海浪尖的鹈鹕可以突然降落在码头的桩上 , 猫头鹰能以64km/h的速度俯冲下抓住一只老鼠 , 这为斯坦福大学的研究人员带来了启迪 。
他们以一种名为游隼的猛禽为参照 , 采用3D打印的方式打造了这款名为SNAG“机器脚爪” 。 它可以助一个无人机锁定与它们接触的任何东西 , 无论是可以栖息的树枝 , 还是空中抛落的球体 。 未来有一天 , 它可能使无人机飞到任何地方 , 甚至成为能“捕猎”的无人机 。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.abj7562
一、“带爪”无人机飞入森林 , 能抓沙袋能接球世界上没有两片相同的雪花 , 树枝也是一样 , 每根树枝的大小、形状和质地存在差异 , 比如有些可能是湿润的 , 或长满了苔藓 , 或有分叉 。 不过 , 鸟类落在树枝上时 , 不受这些树枝情况的影响 , 哪里都可以着陆 。
斯坦福大学工程师马克·卡特科斯基(Mark Cutkosky)和大卫·伦廷克(David Lentink)实验室的研究人员对鸟类的着陆能力非常感兴趣 。 伦廷克说:“对于我们来说 , 有个想法很鼓舞人心——如果设计不同的起落架 , 机器人就可以在任何地方着陆 。 ”
于是 , 两个实验室的研究人员共同为“空中机器人”开发了一种自动“机器脚爪” , 名为SNAG 。 像真实的鸟类一样 , SNAG每次都以相同的方式靠近物体并着陆 。
SNAG能够成功抓握住空中的豆袋和网球 , 并在触发时以受控方式释放它们 。 论文提到 , 其脚和物体之间的速度差约为5 m/s , 与大多数猛禽的动态捕捉行为相比 , 这是小到中等水平 。 要知道 , 豆袋和网球都具有与游隼猎物相似的大小和重量 。
最后 , 罗德里克带着SNAG进入附近的森林 , 在现实世界中 , 进行一些试运行 。 团队发现动态鸟类进近过程中尽管脚部误差很大 , 但仍能实现稳健的近水平着陆 。
总体而言 , SNAG表现非常好 , 对其的下一步开发可能会集中在着陆前的动作优化上 , 例如提高机器人的态势感知和飞行控制能力 。
【斯坦福发明“长腿”无人机!等比例模仿猎鹰,能空中抓球、树上栖息】该研究的第一作者罗德里克说:“令我们惊讶的是 , 无论鹦鹉落在什么样的表面上 , 它们都做了同样的空中机动动作 , 用脚处理着陆材料表面纹理的可变性和复杂性 。 ”SNAG研发期间经过了20次的迭代完善 , 最终才实现较好效果 。
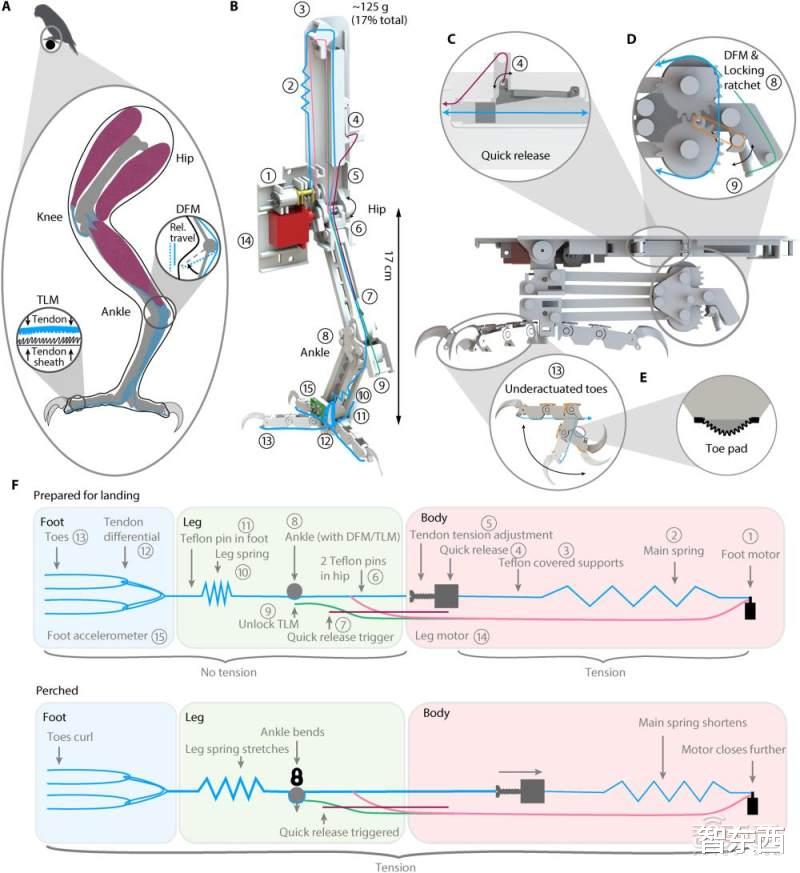
二、比照真鸟3D打印 , 实现两大机制SNAG的设计灵感来自鸟类后肢的功能解剖结构 , 包含一个受鸟类启发的双足足部和腿部系统 , 质量约为250g 。
在众多鸟类中 , 游隼的腿长和腿重在鸟类中具备普遍性 , 且可以每小时200英里的速度俯冲 , 并用爪子抓住其他鸟类 。 SNAG的腿长尺寸、脚趾长度和爪子大小都是等比例参照两只750g的游隼 , 经过3D打印而来 。
为了让更好地把握鸟类特征 , 研究人员曾对世界第二小的鹦鹉物种进行研究 , 包括同时用5个高速摄像机记录这些矮小鸟类在特殊栖木上来回飞行的动作 , 还使用传感器 , 捕获鸟类着陆、栖息和起飞相关的物理力的数据 。
推荐阅读







- 重大成就!我国首颗陆地探测卫星升空,印度人惊叹:真是不可思议
- 现代采矿:古代职业如何在地球内外的当代生活中发挥关键作用
- 最亮的彗星身上发生了不寻常的事
- 屡次碰瓷中国空间站,马斯克的星链卫星到底想干什么?
- 中国航天2022首次开门红,长二丁的成功发射,对全球贡献多大
- “韦伯”为何要去拉格朗日L2点,我国航天器是否有能力飞那么远?
- 没有听说有猎食动物捕杀骆驼,是骆驼生长环境没捕食动物,还是?
- SpaceX破自己记录!拟2022年每周发一次火箭
- 什么是磁层,在哪里?
- 从吹纸到吹书,中国航天霍尔推进器登顶,真不是吹牛