机器视觉系统主要由三部分组成:图像的获取、图像的处理和分析、输出或显示 。
近80%的工业视觉系统主要用在检测方面 , 包括用于提高生产效率、控制生产过程中的产品质量、采集产品数据等 。 产品的分类和选择也集成于检测功能中 。 下面通过一个用于生产线上的单摄像机视觉系统 , 说明系统的组成及功能 。
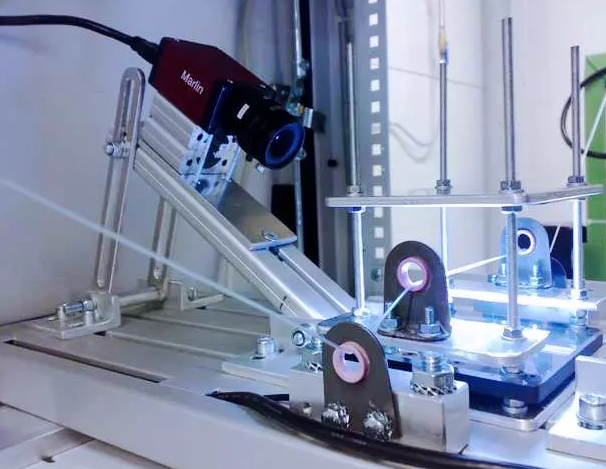
文章图片
那么 , 机器视觉系统设计的难点都有哪些?本文主要总结了一下五点 。
第一:打光的稳定性
工业视觉应用一般分成四大类:定位、测量、检测和识别 , 其中测量对光照的稳定性要求较高 , 因为光照只要发生10-20%的变化 , 测量结果将可能偏差出1-2个像素 , 这不是软件的问题 , 这是光照变化 , 导致了图像上边缘位置发生了变化 , 即使再厉害的软件也解决不了问题 , 必须从系统设计的角度 , 排除环境光的干扰 , 同时要保证主动照明光源的发光稳定性 。 当然通过硬件相机分辨率的提升也是提高精度 , 抗环境干扰的一种办法了 。 比如之前的相机对应物空间尺寸是1个像素10um , 而通过提升分辨率后变成 1个像素5um , 精度近似可以认为提升1倍 , 对环境的干扰自然增强了 。
第二:工件位置的不一致性
【五大|机器视觉系统设计五大难点及解决方法】一般做测量的项目 , 无论是离线检测 , 还是在线检测 , 只要是全自动化的检测设备 , 首先做的第一步工作都是要能找到待测目标物 。 每次待测目标物出现在拍摄视场中时 , 要能精确知道待测目标物在哪里 , 即使你使用一些机械夹具等 , 也不能特别高精度保证待测目标物每次都出现在同一位置的 , 这就需要用到定位功能 , 如果定位不准确 , 可能测量工具出现的位置就不准确 , 测量结果有时会有较大偏差 。
第三:标定
一般在高精度测量时需要做以下几个标定 , 一光学畸变标定(如果您不是用的软件镜头 , 一般都得标定) , 二投影畸变的标定 , 也就是因为您安装位置误差代表的图像畸变校正 , 三物像空间的标定 , 也就是具体算出每个像素对应物空间的尺寸 。
不过目前的标定算法都是基于平面的标定 , 如果待测量的物理不是平面的 , 标定就会需要作一些特种算法来处理 , 通常的标定算法是解决不了的 。
此外有些标定 , 因为不方面使用标定板 , 也必须设计特殊的标定方法 , 因此标定不一定能通过软件中已有的标定算法全部解决 。
第四:物体的运动速度
如果被测量的物体不是静止的 , 而是在运动状态 , 那么一定要考虑运动模糊对图像精度(模糊像素=物体运动速度*相机曝光时间) , 这也不是软件能够解决的 。
第五:软件的测量精度
在测量应用中软件的精度只能按照1/2—1/4个像素考虑 , 可按照1/2 , 而不能向定位应用一样达到1/10-1/30个像素精度 , 因为测量应用中软件能够从图像上提取的特征点非常少 。
盈泰德科技有着多年的机器视觉行业经验 , 在机器视觉的应用领域上积累了丰富的经验 , 有着不少成功的案例和解决方案 , 盈泰德科技一直以来致力于机器视觉产品的生产、开发、应用以及销售 , 为客户提供整体机器视觉解决方案及服务 , 把机器视觉技术应用到智能生产中 。
转自:https://www.0755vc.com
推荐阅读



- 人物|马斯克谈特斯拉人形机器人:有性格 明年底或完成原型
- 硬件|Yukai推Amagami Ham Ham机器人:可模拟宠物咬指尖
- Insight|太卷了!太不容易了!
- 王者|布局手术机器人赛道,谁是王者? | A股2022投资策略⑩
- 机器|戴森达人学院 | 戴森HP09空气净化暖风扇测评报告
- 孙自法|中国科技馆“智能”展厅携多款机器人亮相 喜迎新年和人机共融时代
- 国际|微创血管介入手术机器人获国际创业大赛冠军,获价值千万元奖励
- 猎豹|数字化助力实体消费 机器人让商场“热”起来
- 机器人|微创血管介入手术机器人获国际创业大赛冠军,获价值千万元奖励
- 观众|中国科技馆“智能”展厅携多款机器人亮相